
-
- Downloads
Merge branch 'control-networks' into 'main'
control networks docs Closes #21 See merge request astrogeology/asc-public-docs!34
No related branches found
No related tags found
Showing
- docs/assets/control-networks/moc-hirise-zoomedin-blink.gif 0 additions, 0 deletionsdocs/assets/control-networks/moc-hirise-zoomedin-blink.gif
- docs/assets/control-networks/mola-low-res.png 0 additions, 0 deletionsdocs/assets/control-networks/mola-low-res.png
- docs/assets/control-networks/narrow-sliver-polygon-example.png 0 additions, 0 deletions...assets/control-networks/narrow-sliver-polygon-example.png
- docs/assets/control-networks/overlap-polygon-example.png 0 additions, 0 deletionsdocs/assets/control-networks/overlap-polygon-example.png
- docs/assets/control-networks/qview-measure-for-spacing-calculation-indexcolor.png 0 additions, 0 deletions...orks/qview-measure-for-spacing-calculation-indexcolor.png
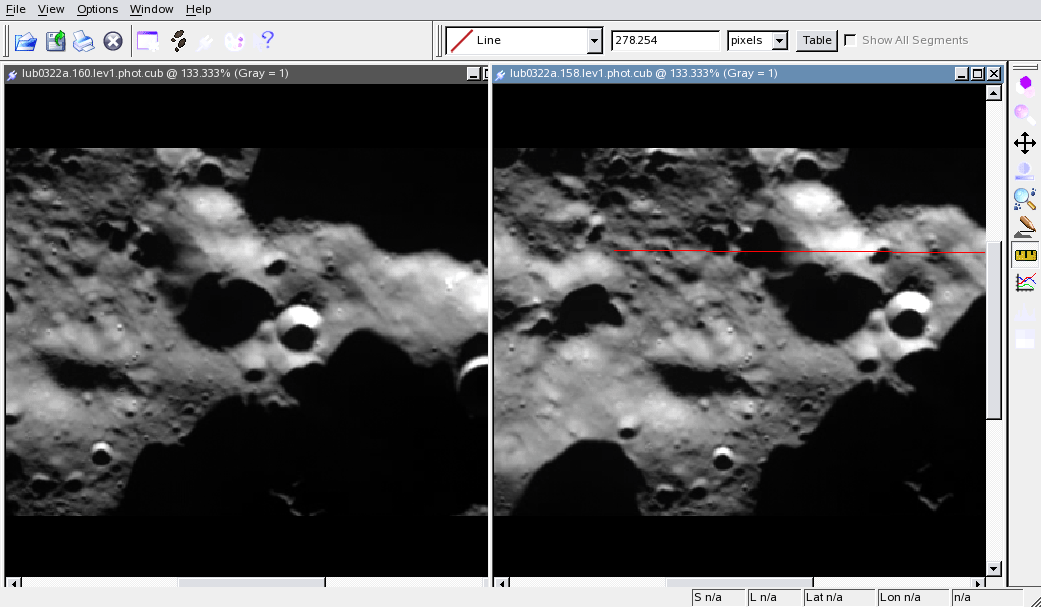
- docs/assets/control-networks/qview-moreoverlap-measure-for-spacing-calculation.png 0 additions, 0 deletions...rks/qview-moreoverlap-measure-for-spacing-calculation.png
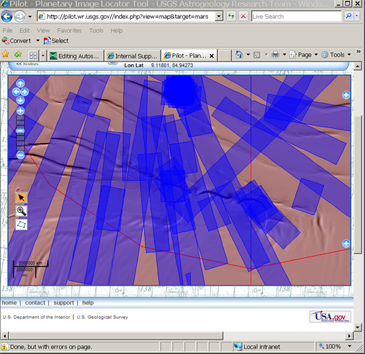
- docs/assets/control-networks/upc-ctx-search-for-footprint-reduced.png 0 additions, 0 deletions...control-networks/upc-ctx-search-for-footprint-reduced.png
- docs/concepts/control-networks/automatic-registration.md 389 additions, 0 deletionsdocs/concepts/control-networks/automatic-registration.md
- docs/concepts/control-networks/autoseed.md 798 additions, 0 deletionsdocs/concepts/control-networks/autoseed.md
- docs/concepts/control-networks/image-registration.md 40 additions, 0 deletionsdocs/concepts/control-networks/image-registration.md
- docs/concepts/control-networks/multi-instrument-registration.md 226 additions, 0 deletions...oncepts/control-networks/multi-instrument-registration.md
- mkdocs.yml 5 additions, 0 deletionsmkdocs.yml
{kind=link}
118 KiB
{kind=link}
31.9 KiB
{kind=link}
94.2 KiB
{kind=link}
22.9 KiB
{kind=link}

94.5 KiB
{kind=link}
126 KiB
{kind=link}
170 KiB
docs/concepts/control-networks/autoseed.md
0 → 100644